Маршрутизация и навигация в режиме AR
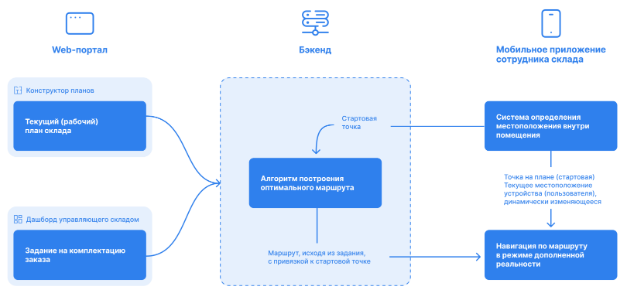
Для построения оптимального маршрута мы используем электронную модель склада, список (адреса ячеек) позиций по заданию и в качестве стартовой точки используем текущее местоположение устройства.
Для определения местоположения устройства, в зависимости от технической возможности и пожеланий клиента мы можем использовать либо графические метки, либо использовать технологию UWB (сверх широкая полоса).
При использовании графических меток, мы можем генерировать метки и размешать их на плане склада в визуальном редакторе, в тех местах где они физически будут размещены, с тем чтобы при попадании метки в поле зрения камеры устройства, метку можно было считать и исходя из плана, определить местоположения устройства.
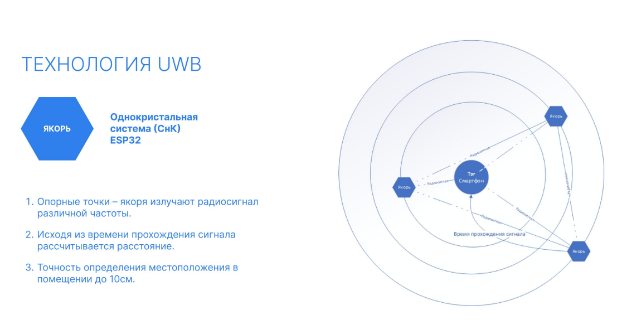
Суть технологии UWB в том что устройство (смартфон или очки) выполняют роль приемника радиосигналов различной частоты, который издают Однокристальные системы – якоря и по времени прохождения сигнала рассчитывает расстояние. По частоте сигнала устройство-приемник определяет что за якорь и далее по методу триангуляции, рассчитав расстояние для трех ближайших якорей, определяет свое местоположение на складе.
Построенный маршрут отображается в мобильном приложении.
Также пользователь может воспользоваться навигацией в режиме дополненной реальности. При этом он будет видеть и окружающую его реальность (склад, системы хранения, объекты хранения) и поверх этой картинки будут отображаться графические подсказки направления движения и указатели на искомый объект (ячейку).